机器人焊接(多层多道)
一、设备简述
适用于煤炭机械行业中液压支架的连杆焊接,采用柔性夹具搭配液压顶紧机构,实现多种连杆型号通用,装卡方便快捷,居中定位,定位精准;采用机器人外部轴作为变位机驱动,与机器人协调联动,并搭配电弧跟踪系统、多层多道焊接技术,使连杆的自动焊接率达到95%以上,其焊缝成型良好,探伤合格率高,极大的提升了生产作业效率。
二、适用工件规格
连杆长度:1~2.8米
三、操作过程
准备:开机,打开气瓶,设备复位;
件装卡:人工将连杆吊装并装卡至夹具上;
程序选择:在机器人示教器上选择相应的焊接程序;
焊接:起弧焊接;
四、设备特点
柔性夹具,适用多种连杆型号,调整方便,装卡快捷;
采用机器人搭配外部轴进行焊接作业,所有焊缝均处于平焊位置,焊缝成型良好;
带有电弧跟踪、多层多道焊接技术,能够及时调整焊缝偏差,自动完成焊缝填充层、盖面层;
搭配水冷焊接电源、水冷焊枪,能承载大电流焊接,极大的提高焊接生产效率;
带有气体压力检测功能,当气体压力不足时设备发出报警并停止焊接。
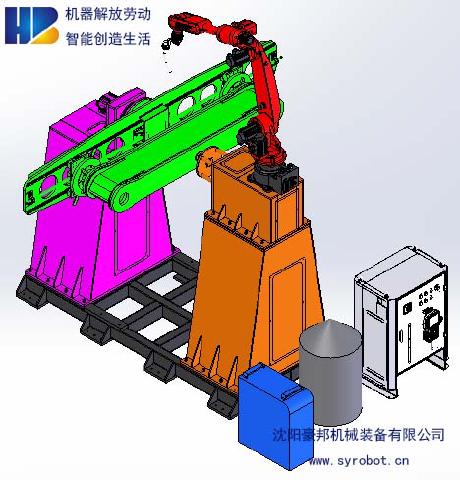
五、设备3D设备图
六、客户现场图片
七、设备现场视频
八、此设备可根据客户需求,定制化设计制造。
九、客户案例
沈阳三一重装